
说明
翻译忠于原文,括号内是自己的想法。
摘要
不同时空,对同一地点,拍摄的照片发生明显平滑变形。通过放射变换近似(还原)这些变形。SIFT(具有平移,旋转和缩放的不变性)本身不具有仿射不变性!所以提出ASIFT方法!
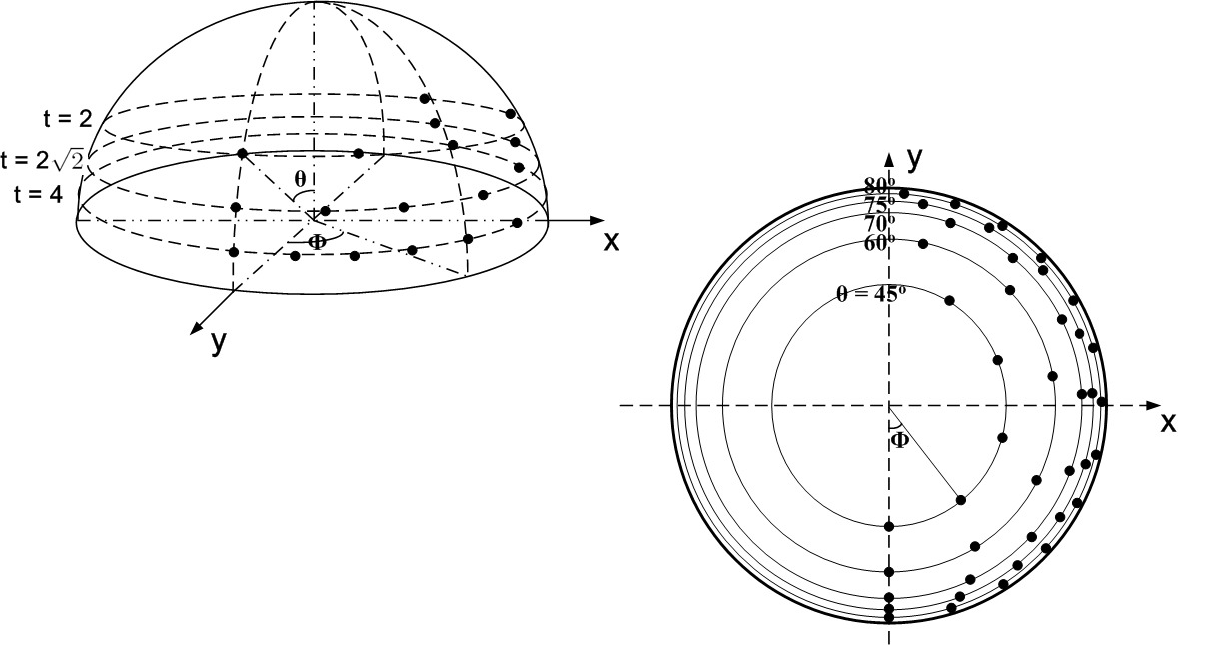
Affine-SIFT(ASIFT)模拟初始图像的一组样本视图,可通过改变两个摄像机轴方向参数,即纬度和经度角,然后它将SIFT方法本身应用于由此生成的所有图像。(在多个仿射空间进行SIFT,类似DL中的数据增强,此处可进行数据并行) 因此,ASIFT有效地覆盖了仿射变换(介绍)的所有六个参数。
总览
SIFT解决了仿射变换6个参数中4个的不变性,ASIFT解决剩下的2个参数。文章定义了transition tilt,用来衡量算法对仿射变换的变化抵抗能力,SIFT是2,HAHA是2.5,MSER是10,ASIFT是32。
注意到所有大方法都没有考虑到大气造成的模糊,以及过远距离产生的大气中光线弯曲现象。
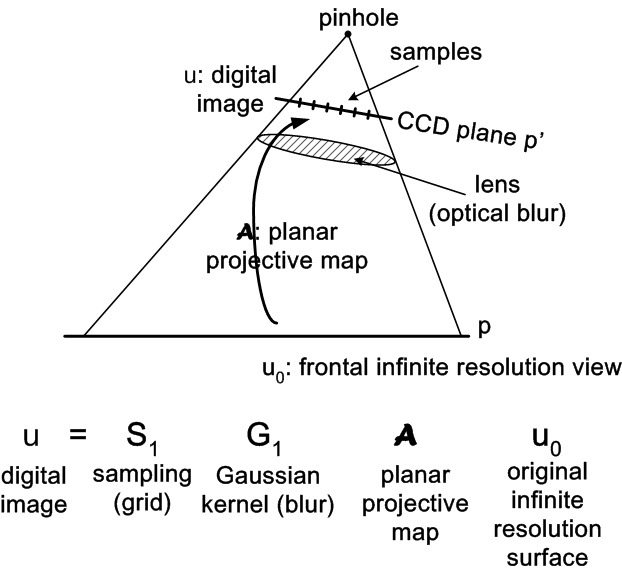
仿射相机模型
$$u=S_1G_1ATu_0$$
其中u是数字图像,u0是对象的(理想)无限分辨率正面视图。由于相机运动,参数T和A分别是平面平移和平面投影图。 G1是对光学模糊进行建模的高斯卷积,S1是具有网格1的规则网格上的标准采样算子。
ASIFT算法描述
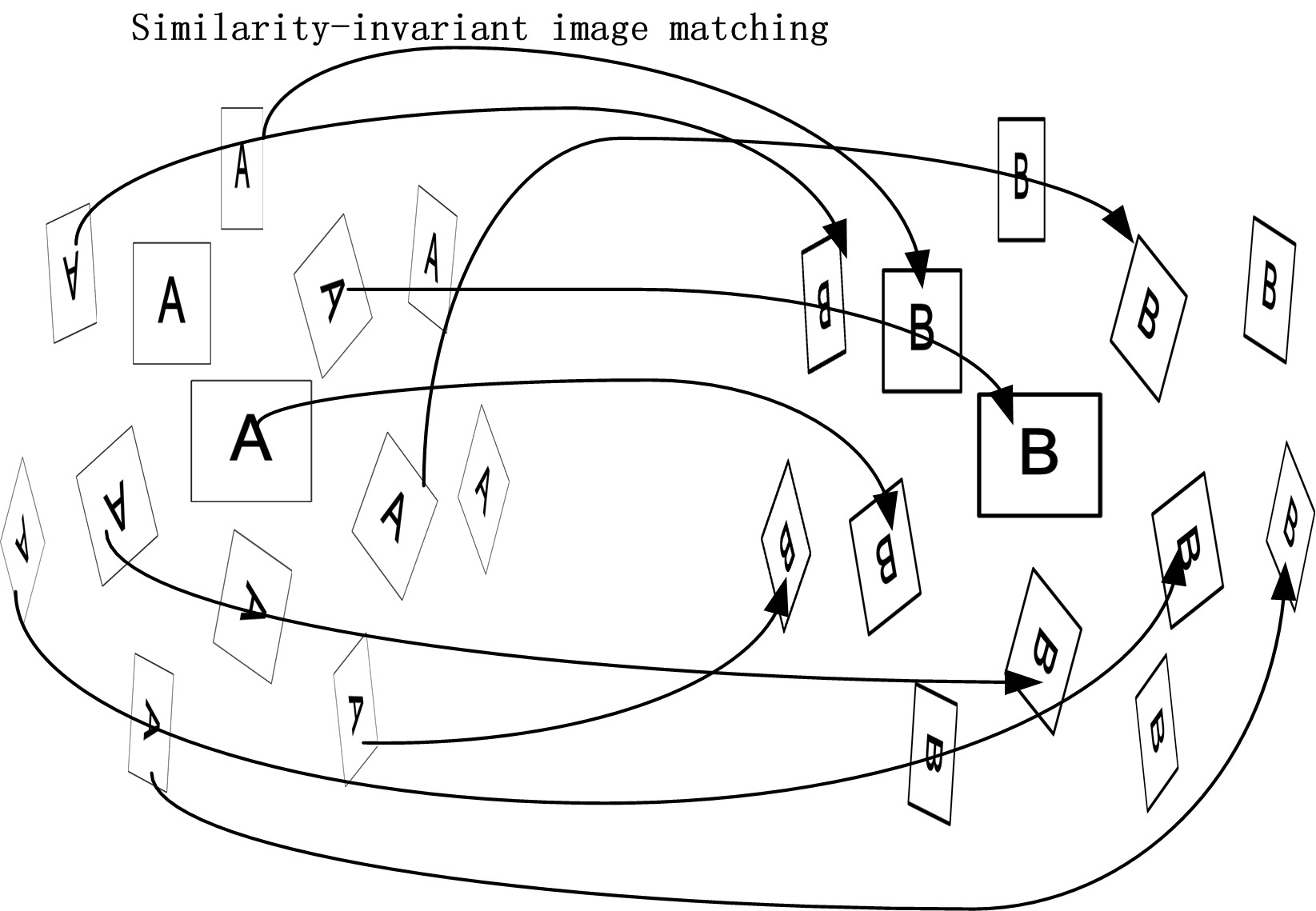
本质上是做了数据增强,对待匹配的两张图模拟相机视角相对移动(进行仿射变换)做了多次仿射变换,得到两组多张图像两两进行SIFT匹配。
这里ASIFT其实并没有真正去解仿射变换中SIFT未解决的那2个参数,若要解出参数,是需要标定点建立方程的,这降低了算法使用的便利性。ASIFT使用合理的采样,用有限的情况去拟合解空间,可以认为是某种brute-force方法。
计算复杂度
按文章的采样方法,特征检测时间复杂度是原来的13倍,匹配是原来的180倍。(不过该算法并行性很好,在并行架构大行其道的今天完全可以优化到0(logn))
留言