PnP的定义
PnP = Perspective-n-Point,中文常叫:
透视n点位姿估计问题
或
n点透视定位问题
它的标准定义是:
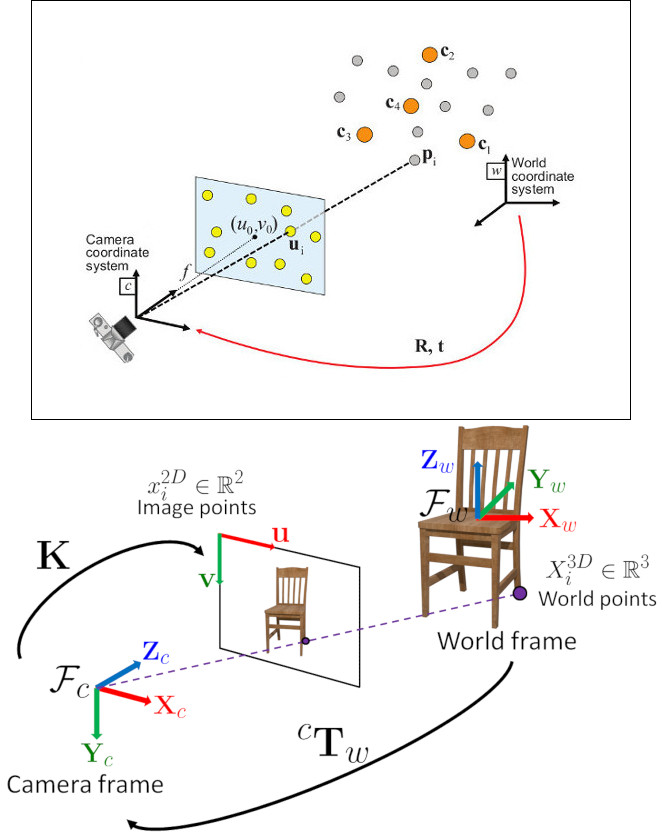
已知n个三维点在某个参考坐标系下的坐标,以及它们在图像中的二维投影点,同时已知相机内参,求相机相对于这些三维点所在坐标系的位姿,也就是R,t。
OpenCV 对 solvePnP 的定义也是这个意思:给定 object points、对应 image projections、相机内参和畸变参数,估计目标物体的位姿。
所谓三维点在某个参考坐标系下的坐标,一般是以某个刚性物体的几何中心(或者某个关键传感器)作为原点的“物体坐标系”。最典型的例子就是无人机三维跟踪任务中的“被观测的飞机的机体坐标系”。
PnP数学描述与求解
假设这么一个场景,现在要做无人机3d目标跟踪,观测相机保持不动(实际上完全可以相对移动世界坐标系运动,但这里为简单做出假设)。
我们提前标定了无人机的5个特征点(比如4个电机与顶部LED灯的距离参数,电机也带LED灯)。那么我们可以实现进通过单帧观测就能求解出无人机位姿吗?答案是肯定的,而且这就是经典的PnP问题。
我们稍微抽象一下:
已知无人机机体坐标系下 5 个特征点的 3D 坐标,例如 4 个电机 LED + 顶部 LED;
已知相机内参;
在一帧图像中检测到其中至少 4 个特征点的 2D 像素坐标;
求无人机坐标系相对于相机坐标系的旋转 R 和平移t。
核心投影模型是:
其中:(X,Y,Z) 是特征点在无人机机体系下的 3D 坐标;(u,v) 是图像中的像素坐标;K 是相机内参;R,t 就是要求的无人机相对相机位姿;s 是深度尺度因子。
注意这里需要满足几个条件:
1. 相机内参必须已知
包括:
以及畸变参数。如果是长焦、广角、鱼眼相机,畸变校正尤其重要。
2. 无人机上的特征点 3D 坐标必须已知
不是只知道“几个点之间的大概距离”,最好是建立一个无人机机体系,例如以机体中心为原点:
例如四个电机大概率在同一平面:
顶部 LED 可以设成:
这样 5 个点就不是完全共面了,位姿求解会更稳定。
3. 图像中必须知道每个点对应哪个 3D 点
也就是说,不能只是检测到 5 个亮点,还要知道:
- 这个是左前电机;
- 这个是右前电机;
- 这个是左后电机;
- 这个是右后电机;
- 这个是顶部 LED。
如果四个电机 LED 完全一样,且无人机外形对称,就可能出现点匹配歧义,导致解出来的朝向翻转或者旋转 90°。
解决办法包括:
- 不同 LED 使用不同颜色;
- 不同 LED 使用不同闪烁频率;
- 顶部 LED 与电机 LED 外观不同;
- 利用前后灯颜色区分机头方向;
- 结合上一帧跟踪结果做时序约束。
至少需要几个点?
理论上:
- 3 个点:P3P,可以求解,但通常有多个候选解;
- 4 个点:可以消除多数歧义,常用;
- 5 个及以上点:更稳,可以做最小二乘优化和异常点剔除。
工程上建议:
检测 2D LED 点
→ 建立 2D-3D 对应
→ solvePnP / EPnP / P3P + RANSAC
→ 非线性优化 refine
→ 输出 R,t
→ 接入 Kalman / EKF / UKF 做 3D 跟踪
OpenCV 里就是:
cv::solvePnP(
objectPoints, // 无人机机体系下的 3D 点
imagePoints, // 图像中的 2D 点
cameraMatrix, // 相机内参
distCoeffs, // 畸变参数
rvec,
tvec
);
如果有误检或漏检,建议用:
cv::solvePnPRansac(...)
可能遇到的问题:四个电机大概率共面
如果只用 4 个电机点,它们通常都在一个平面上。此时问题退化成类似平面靶标位姿估计,本质上可以通过 homography 求解。
但共面点有几个问题:
- 存在镜像歧义风险;
- 远距离时深度方向不稳定;
- 正对相机时姿态估计还可以,斜视/小视角时容易抖;
- 如果四个点近似成正方形,对称性会导致 yaw 歧义。
所以“顶部 LED 灯”很关键。它让 5 个点形成非共面 3D 结构,这会明显提高 PnP 的稳定性。
换句话说:
只用四个电机 LED:能做,但容易退化;
四个电机 LED + 顶部 LED:非常适合做单目 6DoF 位姿估计。
相机保持不动有什么帮助?
相机保持不动意味着相机坐标系可以看作世界坐标系,或者提前知道:
那么每一帧求得的是:
如果要转到世界坐标系:
因此单帧可以得到无人机的:
- 3D 位置:x,y,z
- 姿态:roll, pitch, yaw
- 后续多帧还可以估计速度、角速度、轨迹。
这和“3D目标跟踪”的关系
单帧 PnP 解决的是:
3D pose estimation
多帧连续估计之后,就是:
3D tracking
典型系统可以这样设计:
LED检测 / 关键点检测
↓
2D关键点匹配
↓
PnP求单帧6DoF位姿
↓
重投影误差检查
↓
Kalman / EKF / UKF / 因子图平滑
↓
输出稳定的3D轨迹和姿态
跟踪时可以用运动模型约束,例如:
这样即使某一帧只看到 3 个点,甚至短暂丢点,也可以靠预测和重投影继续关联。